 Due to widespread COVID-19-related travel restrictions and disruptions, RFID Journal LIVE! 2020 and IEEE RFID 2020 have rescheduled the conference and industry gathering for September 9-11, 2020, at the same venue (Orange County Convention Center, Orlando, FL). Registration deadlines and other submission deadlines will be modified accordingly — keep an eye on the website as updates are posted!
Due to widespread COVID-19-related travel restrictions and disruptions, RFID Journal LIVE! 2020 and IEEE RFID 2020 have rescheduled the conference and industry gathering for September 9-11, 2020, at the same venue (Orange County Convention Center, Orlando, FL). Registration deadlines and other submission deadlines will be modified accordingly — keep an eye on the website as updates are posted!
Call for Participation for IEEE RFID 2020 Workshop on Wireless MoCap
 As part of the IEEE 2020 conference in Orlando, FL, we announce the Workshop on Wireless MoCap. Please view the Call for Participation for more information. Taking place from 28-29 April 2020, the workshop will be exploring applications in wireless motion capture, fine-scale localization, and imaging. The workshop is currently accepting talk abstracts, full papers, tutorial proposals, demonstrations, and posters.
As part of the IEEE 2020 conference in Orlando, FL, we announce the Workshop on Wireless MoCap. Please view the Call for Participation for more information. Taking place from 28-29 April 2020, the workshop will be exploring applications in wireless motion capture, fine-scale localization, and imaging. The workshop is currently accepting talk abstracts, full papers, tutorial proposals, demonstrations, and posters.
Cheng Qi and Francesco Amato’s Award-Winning Localization Paper
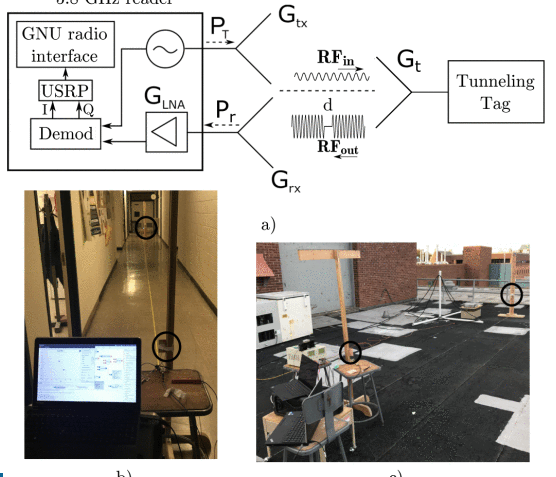
Breaking the Range Limit of RFID Localization: Phase-based Positioning with Tunneling Tags
Cheng Qi ; Francesco Amato ; Mohammad Alhassoun ; Gregory D. Durgin
2019 IEEE International Conference on RFID (RFID)
Year: 2019 | Conference Paper | Publisher: IEEE
Abstract: The measurements reported in this work demonstrate the ability to extend the localization range of low-powered RFID tags to distances usually not achievable with conventional RFID technology. The ranging technique is performed through the Frequency Domain Phase Difference Of Arrival (FD-PDOA) method on a 5.8 GHz Tunneling Tag, both in a multipath-rich indoor environment and outdoor, at distances up to 15 meters from the reader. Range estimation errors as low as 1.95% were observed, moreover, an EIRP of only 10.5 dBm, a biasing power for the Tunneling Tag of only 21.32 μW (80 mV), and a tag antenna gain of 1 dBi suggest the potential of power-stingy Tunneling Tags to be used in low-powered RFID localization applications for very long-range scenarios.
Motion Capture Using RFID and the Kalman Filter
 Analysis of Kalman Filter-Based Localization for HIMR RFID Systems
Analysis of Kalman Filter-Based Localization for HIMR RFID Systems

Qian Yang, David G. Taylor, Muhammad B. Akbar, Gregory D. Durgin
IEEE Journal of Radio Frequency Identification, 2019
A new paper demonstrating the power of the Kalman filter is now available. GTPG researcher Qian Yang and coauthors use sensor-fusion data from a microwave backscatter link to demonstrate mm-scale localization of RF transponders. This study is unique because it breaks down the individual contributions of signal strength, backscatter phase, and inertial sensor measurements to a very precise position estimation problem. This work is an important next-step in the “holy grail” of wireless position location: precise motion-capture at a distance in 3D.
- « Previous Page
- 1
- 2
- 3
- 4
- …
- 6
- Next Page »